サンプル画面
(下の画像をクリックすると拡大します。右下の×をクリックして画像を閉じます。)
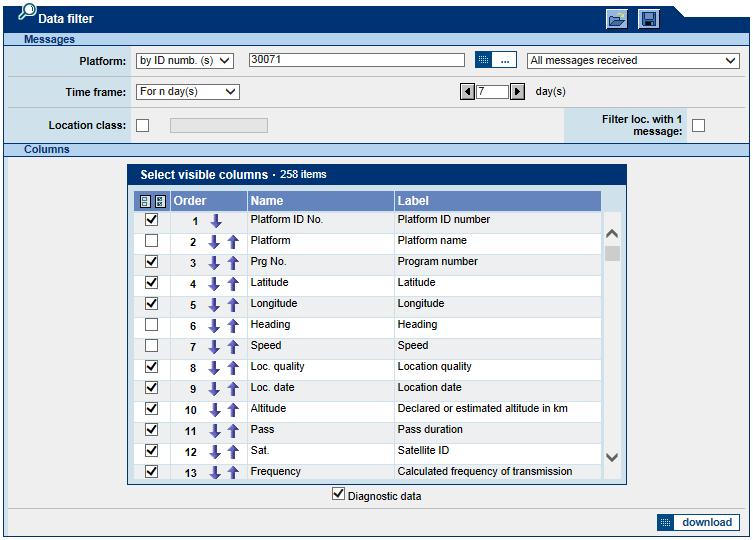
ダウンロード画面の使用方法
まず、ダウンロードするデータのプラットフォームや期間などを指定します。Platform (プラットフォーム), Time frame (期間), Location class (位置クラス), Filter loc. with 1 message (1メッセージの位置を除去) , All messages recieved(受信した全メッセージ, DSフォーマットに相当)あるいはMost significant or best on satellite pass(各衛星パスの代表メッセージ, TXフォーマットに相当)の5項目について入力します。それぞれの項目について下のタブで説明します。
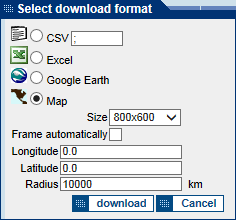 入力が完了したら、「Download」をクリックします。ダウンロードファイルの形式などを指定する右図のようなタブを表示しますので、CSV(右横のテキストボックスに区切り記号を入力できます), Excel, Google Earth(KML形式), Map(GIF形式)の中から選択します。
入力が完了したら、「Download」をクリックします。ダウンロードファイルの形式などを指定する右図のようなタブを表示しますので、CSV(右横のテキストボックスに区切り記号を入力できます), Excel, Google Earth(KML形式), Map(GIF形式)の中から選択します。
「Map」を選択すると、プラットフォームの位置を地図にマッピングした画像をエクスポートします。画像のサイズを選択し、表示範囲をFrame automatically(自動)にチェックを入れるか、あるいは、チェックを外して、(緯度), Latitude(経度), Radius(半径)を入力して表示する地図の範囲を決定します。
最後に「Download」ボタンをクリックして、データをダウンロードします。
プラットフォームの選択
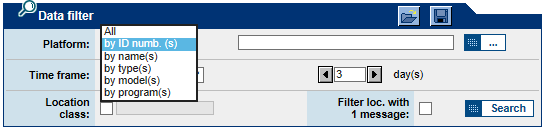
「Platform」の右横のプルダウンメニューをクリックし、プラットフォームの選択方法を指定します。All (すべてのプラットフォーム), by ID num.(s) (ID番号), by name(s) (名前), by type(s)(種類), by model(s) (送信機型式), by program(s) (プログラム)の5種類あります。「All 」以外を選択すると、プラットフォームを個別に選択するテキストボックスとボタンが右に表示されます。
テキストボックスに直接入力するか(複数ある場合はカンマ(「,」区切り)、あるいは右のボタン  をクリックし、ダイアログボックスを表示させてプラットフォームを選択します。
をクリックし、ダイアログボックスを表示させてプラットフォームを選択します。
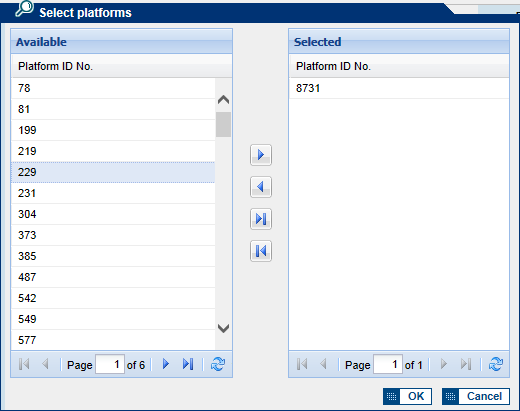
「Available」の下に並んでいるプラットフォームをクリックして選択し(背景が薄青になります)、右矢印ボタン  をクリックすると右の「Selected」に移動します。最初の画面に表示されていないプラットフォームは、スクロールバーまたはページを移動して表示させることができます。「Selected」に移動させたプラットフォームを取り消したい場合は、同様に、プラットフォームをクリックして選択し(背景が薄青になります)、左矢印ボタン
をクリックすると右の「Selected」に移動します。最初の画面に表示されていないプラットフォームは、スクロールバーまたはページを移動して表示させることができます。「Selected」に移動させたプラットフォームを取り消したい場合は、同様に、プラットフォームをクリックして選択し(背景が薄青になります)、左矢印ボタン  をクリックすると左の「Available」に移動します。すべてのプラットフォームを移動したい場合は
をクリックすると左の「Available」に移動します。すべてのプラットフォームを移動したい場合は  または
または  をクリックします(表示されていないプラットフォームを含めてすべて移動します)。
をクリックします(表示されていないプラットフォームを含めてすべて移動します)。
期間の選択
「Platform」の右横のプルダウンメニューをクリックし、Most recent data (最新データのみ) または For n day(s) (n日前以降のデータ) のいずれかを指定します。「For n day(s)」を選択すると、日数を指定するテキストボックスおよび矢印アイコンが表示されます。テキストボックスに直接数字を入力するか矢印アイコンをクリックして日数を決定します。1から20までの数字が有効です。

上の例では、3日前の世界時0時以降のデータを検索します。ログイン時に違うタイムゾーンを選択した場合は、時間を変換しますが期間は同じです。つまり上の例で、タイムゾーンが日本標準時の場合は、3日前の日本標準時9時以降のデータを検索します。
位置クラスの選択
「Location class」の右横のチェックボックスにチェックが入っていない場合は、すべての位置クラスのデータを検索します。また、チェックボックスをクリックしてチェックを入れると、位置クラスを個別に選択するテキストボックスとボタンが右に表示されます。
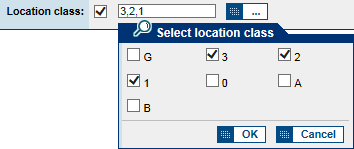
テキストボックスに直接入力するか(複数ある場合はカンマ「,」区切り)、あるいは右のボタン をクリックし、ダイアログボックスを表示させて位置クラスを選択します。
全データ表示または代表データ表示の選択
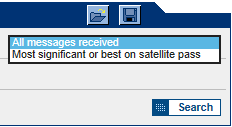 右図のように画面右上の矢印をクリックし、All messages recieved(受信した全メッセージ, DSフォーマットに相当)、あるいはMost significant or best on satellite pass(各衛星パスの代表メッセージ, TXフォーマットに相当)のいずれかを選択します。
右図のように画面右上の矢印をクリックし、All messages recieved(受信した全メッセージ, DSフォーマットに相当)、あるいはMost significant or best on satellite pass(各衛星パスの代表メッセージ, TXフォーマットに相当)のいずれかを選択します。
1メッセージ位置の除去
 「Filter loc. with 1 message」の右横のチェックボックスをクリックしてチェックを入れると、1衛星パスで1メッセ―ジのみ受信した場合に計算された位置データを除去します。また、位置データのない行も除去しすので注意してください。
「Filter loc. with 1 message」の右横のチェックボックスをクリックしてチェックを入れると、1衛星パスで1メッセ―ジのみ受信した場合に計算された位置データを除去します。また、位置データのない行も除去しすので注意してください。
検索設定の保存
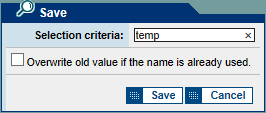 データの検索で指定したプラットフォームや期間などの設定を保存したり、再度利用するために読み出すことができます。画面右上の
データの検索で指定したプラットフォームや期間などの設定を保存したり、再度利用するために読み出すことができます。画面右上の  をクリックすると右図のように検索設定保存のタブを表示します。テキストボックスに英数字で設定名を入力し、「Save」ボタンをクリックして保存します。チェックボックスにチェックを入れると、すでに同じ名前で保存されている場合に設定が自動的に上書きされます。
をクリックすると右図のように検索設定保存のタブを表示します。テキストボックスに英数字で設定名を入力し、「Save」ボタンをクリックして保存します。チェックボックスにチェックを入れると、すでに同じ名前で保存されている場合に設定が自動的に上書きされます。
 画面右上の
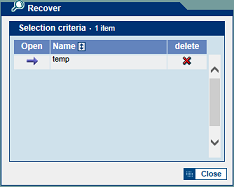
画面右上の  をクリックすると右図のように保存した検索設定を読み出すタブが表示されます。読み出す設定名の左横の矢印をクリックし、設定を読み出します。また、右横の×印をクリックすると設定を削除します。
をクリックすると右図のように保存した検索設定を読み出すタブが表示されます。読み出す設定名の左横の矢印をクリックし、設定を読み出します。また、右横の×印をクリックすると設定を削除します。
データ項目
| 項目名 | 内容 |
|---|---|
| Platform ID No. | アルゴスID番号 |
| Platform | プラットフォーム名。あらかじめ登録している場合に表示されます。SettingsメニューのPlatformsサブメニューで設定します。 |
| Prg No. | アルゴスプログラム番号 |
| Format name | センサーフォーマット名。アルゴスメッセージの表示形式を指定するフォーマット。プラットフォームの型式によってほぼ決まっており、アルゴスID発行時に設定されます。詳しくはお問い合わせください。 |
| Latitude | プラットフォームの緯度 |
| Longitude | プラットフォームの経度 |
| Heading | プラットフォームの方位 |
| Speed | プラットフォームの速度 |
| Loc. quality | 位置クラス。詳しくは |
| Loc. date | 位置の日時 |
| Altitude | プラットフォームの高度。緯度および経度はこの高度を前提に計算されています。通常はアルゴスIDを発行する際に固定値(例えば海洋漂流ブイは0m)を設定します。陸上の移動体および鳥類追跡用のプラットフォームでは、アメリカ地質調査所 USGS の数値標高モデル GTOPO30 を位置計算のアルゴリズムに組み込んでおり、その位置のGTOPO30の高度を基に緯度および経度を算出します。この高度値を表示します。 |
| Pass | 1衛星パスにおける最初のメッセージ受信時刻と最後の受信時刻の間隔 |
| Sat. | メッセージを受信した衛星名 |
| Msg date | メッセージ受信日時 |
| Frequency | 位置算出の過程で計算された送信機の送信周波数。単位はHz。 |
| Comp. | Compression indexを略したもので、1衛星パスで全く同じ内容のメッセージを何個受信したかを示します。すなわち、同じ内容のメッセージをまとめて1行で表示します。 |
| Alarm | アラーム |
| Sensor 01 | 1番目のセンサーデータ。フォーマットによって「BATTERY」などの項目名で表示される場合があります。 |
「Diagnostic data」にチェックが入っている場合は、以下のデータ項目を追加して表示します。
| 項目名 | 内容 |
|---|---|
| Lat. sol. 1 | 最小二乗法による位置算出では、2つの位置が計算されます。そのうち、正しいと判断された位置の緯度。 |
| Long. 1 | 同経度。 |
| Lat. sol. 2 | 最小二乗法によって算出されたもうひとつの位置(ミラー位置)の緯度。カルマンフィルターによる位置算出の場合は、「Lat. sol. 1」と同じ値が表示されます。 |
| Long. 2 | 最小二乗法によって算出されたもうひとつの位置(ミラー位置)の経度。カルマンフィルターによる位置算出の場合は、「Long. 1」と同じ値が表示されます。 |
| Loc. indx | Location indexの略で、衛星で計算したプラットフォームの周波数の安定度などを示します。詳しくはお問い合わせください。 |
| NOPC | Number Of Plausibility Checkの略で、 計算された位置の品質管理チェックを3または4項目行い、そのうちパス(合格)したチェック項目の数を表します。詳しくはオンラインマニュアル(英文)の第3.2.2章()をご覧ください。 |
| Mes | 受信したメッセージ数 |
| > -120 DB | 衛星での受信レベルが-120dBm以上のメッセージ数 |
| Best level | 受信メッセージの中の最高受信レベル |
| Delta freq. | Delta frequencyの略で、衛星の受信装置で計算したプラットフォームの送信周波数から401MHzを引いた値。 |
| Error radius | エラー半径。誤差を円で表示したときのエラー半径をメートル単位で表示します。 |
| Semi-major axis | エラー長半径。誤差を傾きのある楕円で表示したときの楕円の長半径をメートル単位で表示します。 |
| Semi-minor axis | エラー短半径。誤差を傾きのある楕円で表示したときの楕円の短半径をメートル単位で表示します。 |
| Ellipse orientation | エラー楕円の傾き。誤差を傾きのある楕円で表示したときの楕円の傾きを、北から東に向かう方向に度で表示します。 |
| GDOP | Geometric Dilution Of Precisionの略で、位置の精度に影響を及ぼす衛星と送信機の位置関係の尺度です。送信機から見た衛星による受信ポイントが全天球上に広く分布するほど小さい値となり、計算された位置の精度が高くなります。 |
位置クラス
位置精度および位置計算に関する情報を表します。位置精度は、衛星パスの幾何学的条件、送信機の送信周波数の安定度、受信メッセージ数およびそれらのパス時間内での分布、などに依存します。
| クラス | 誤差 | |
| 3 | 250m以内 | 1衛星パスで4メッセージ以上の受信が必要。 |
| 2 | 250mから500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 1 | 500mから1500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 0 | 1500mより大きい | 1衛星パスで4メッセージ以上の受信が必要。位置サービスプラスを適用した場合に計算する。 |
| G | 100m以内 | GPS受信機で計算した位置。特別な処理が必要なため詳しくはお問い合わせください。 |
| A | 特定できない | 1衛星パスで3メッセージ受信したときに計算する位置。位置サービスプラスの適用が必要。 |
| B | 特定できない | 1衛星パスで2メッセージ受信したときに計算する位置。カルマンフィルターでは1メッセージでも計算する。位置サービスプラスの適用が必要。 |
| Z | 位置算出ができなかった、または位置計算アルゴリズムが正しく収束しなかったことを示します。 |