データの入手方法
TELETクライアントでフランスのアルゴスサーバー(argosserver.cls.fr)にアクセスすると、
Username:
というプロンプトを表示します。お持ちのアルゴスアカウントのユーザ名およびパスワードを入力してログインします。
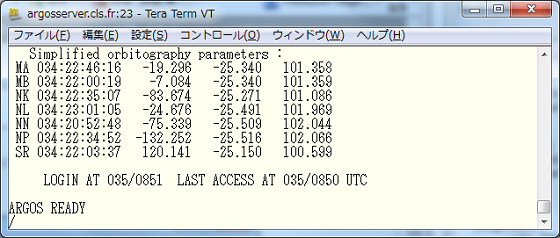
衛星の軌道情報およびログインした日時、前回アクセスした日時を表示した後、
ARGOS READY
/
というプロンプトを表示します。ここでコマンドを入力するとデータを出力します。アルゴスサーバーでは日付を1月1日からの日数で表示することがあります。時刻は世界時で表示します。上の例では、035/0851は世界時の2月4日8時51分を意味します。
以下にコマンド例を示します。詳しくは、英文のアルゴスオンラインマニュアル( ) の第6.3章をご覧ください。
) の第6.3章をご覧ください。
DSフォーマット
衛星で受信したすべてのメッセージを衛星パスごとに表示します。
コマンドを、
PRV,プログラム番号,DS,日時,アルゴスID番号
と入力します。大文字でも小文字でも有効です。
日時の入力は日付を1月1日からの日数にします。「/」およびそのあとの2桁の数字(時)を省略すると0時とみなします。また、プログラム番号あるいはアルゴスID番号のどちらかを省略することができます。
例1) PRV,,DS,53,10000
アルゴスID番号が10000の送信機から発信したメッセージで、53日(2月22日0時)以降に衛星で受信したDSデータを要求するコマンドです。プログラム番号を省略したため、PRVとDSの間にカンマ( , )が2回入ります。
例2) PRV,,DS,53-54,10000
アルゴスID番号が10000の送信機から発信したメッセージで、53日(2月22日0時)から54日(2月23日0時)の間に衛星で受信したDSデータを要求するコマンドです。2つの日時をハイフン(-)で結ぶと特定の期間のデータを取得することができます。
例3) PRV,,DS,53,10000,10001
アルゴスID番号が10000および10001の送信機から発信したメッセージで、53日(2月22日0時)以降に衛星で受信したDSデータを要求するコマンドです。プログラム番号あるいはアルゴスID番号をカンマ( , )でつなげると複数のプログラムやアルゴスIDのデータを取得することができます。
TXフォーマット
受信したすべてのメッセージの中から各衛星パスで代表メッセージをひとつ選び表示します。
コマンドを、
PRV,プログラム番号,TX,日時,アルゴスID番号
と入力します。大文字でも小文字でも有効です。上述のDSをTXに置き換えただけで後は同じになります。
DIAGフォーマット
品質チェックを満たさないものを含め計算されたすべての位置データを表示し、同時に種々のパラメータを提供してユーザーがデータの有用性を判断するのを助ける分析用のフォーマットです。
コマンドを、
DIAG,プログラム番号,,日時,アルゴスID番号
と入力します。大文字でも小文字でも有効です。上述のPRVをDIAGに置き換え、また、DSあるいはTXを省略しただけで後は同じになります。
COMコマンド
最新の受信メッセージのみをTXフォーマットで表示します。コマンドを、
COM,プログラム番号,,ALL または COM,,,アルゴスID番号
と入力します。大文字でも小文字でも有効です。プログラム番号とALLの間にカンマ( , )が2回、COMとアルゴスID番号の間にカンマ( , )が3回入りますので注意してください。
DSフォーマット
DSフォーマットは衛星で受信したすべてのメッセージを衛星パスごとにまとめて表示します。下の例は1つの衛星パスで受信した1つのプラットフォームからのメッセージになります。全く同じ内容のメッセージが複数ある場合まとめて1行で表示し、受信日時は最後に受信したメッセージの日時で表示します。
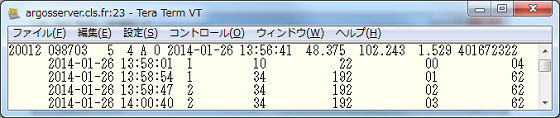
| 1行目 | |
| 20012 | プログラム番号 |
| 098703 | アルゴスID番号 |
| 5 | データの行数 |
| 4 | 1メッセージのセンサーデータの数 |
| A | 衛星の名前。AはMetOp-A衛星を指します。 |
| 0 | 位置クラス。詳しくは |
| 2014-01-26 | 位置データの年月日 |
| 13:56:41 | 位置データの時刻(世界時) |
| 48.375 | 緯度(正の値は北緯、負の値は南緯を表します) |
| 102.243 | 経度(東の方向に0~360°で表示します) |
| 1.529 | 高度。単位はkm。緯度および経度はこの高度を前提に計算されています。通常はアルゴスIDを発行する際に固定値(例えば海洋漂流ブイは0m)を設定します。陸上の移動体および鳥類追跡用のプラットフォームでは、アメリカ地質調査所 USGS の数値標高モデル GTOPO30 を位置計算のアルゴリズムに組み込んでおり、その位置のGTOPO30の高度を基に緯度および経度を算出します。この高度値を表示します。 |
| 401672322 | 位置算出の過程で計算された送信機の送信周波数。単位はHz。 |
| 2行目 | |
| 2014-01-26 | メッセージの受信年月日 |
| 13:58:01 | メッセージの受信時刻(世界時) |
| 1 | 同じ内容のセンサーデータ値をもつメッセージの数(Compression index) |
| 10 | 1番目のセンサーデータ |
| 22 | 2番目のセンサーデータ |
| 00 | 3番目のセンサーデータ |
| 04 | 4番目のセンサーデータ |
位置クラス
位置精度および位置計算に関する情報を表します。位置精度は、衛星パスの幾何学的条件、送信機の送信周波数の安定度、受信メッセージ数およびそれらのパス時間内での分布、などに依存します。
| クラス | 誤差 | |
| 3 | 250m以内 | 1衛星パスで4メッセージ以上の受信が必要。 |
| 2 | 250mから500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 1 | 500mから1500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 0 | 1500mより大きい | 1衛星パスで4メッセージ以上の受信が必要。位置サービスプラスを適用した場合に計算する。 |
| G | 100m以内 | GPS受信機で計算した位置。特別な処理が必要なため詳しくはお問い合わせください。 |
| A | 特定できない | 1衛星パスで3メッセージ受信したときに計算する位置。位置サービスプラスの適用が必要。 |
| B | 特定できない | 1衛星パスで2メッセージ受信したときに計算する位置。カルマンフィルターでは1メッセージでも計算する。位置サービスプラスの適用が必要。 |
| Z | 位置算出ができなかった、または位置計算アルゴリズムが正しく収束しなかったことを示します。 |
TXフォーマット
TXフォーマットは各衛星パスで代表メッセージ1種類だけを表示します。下の例は1つの衛星パスにおける1つのプラットフォームからの代表メッセージです。代表メッセージの選び方の説明は
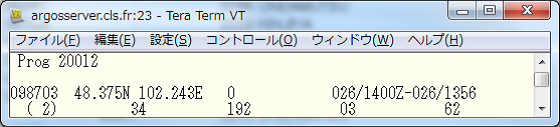
| 1行目 | |
| 098703 | アルゴスID番号 |
| 48.375N | 緯度。数値のあとにN(北緯)またはS(南緯)をつけて表示します。 |
| 102.243E | 経度。数値のあとにE(東経)またはW(西経)をつけて表示します。 |
| 0 | 位置クラス。詳しくは |
| 026/1400Z | 代表メッセージの受信日時(世界時)。/の左が日付で1月1日からの日数で表示し、/の右が時・分になります。最後にZをつけます。この例では、1月26日14時00分となります。 |
| 026/1356 | 位置データの日時(世界時)。/の左が日付で1月1日からの日数で表示し、/の右が時・分になります。この例では、1月26日13時56分となります。 |
| 2行目 | |
| ( 2) | 同じ内容のセンサーデータ値をもつメッセージの数(Compression index) |
| 34 | 代表メッセージの1番目のセンサーデータ |
| 192 | 代表メッセージの2番目のセンサーデータ |
| 03 | 代表メッセージの3番目のセンサーデータ |
| 62 | 代表メッセ―ジの4番目のセンサーデータ |
位置クラス
位置精度および位置計算に関する情報を表します。位置精度は、衛星パスの幾何学的条件、送信機の送信周波数の安定度、受信メッセージ数およびそれらのパス時間内での分布、などに依存します。
| クラス | 誤差 | |
| 3 | 250m以内 | 1衛星パスで4メッセージ以上の受信が必要。 |
| 2 | 250mから500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 1 | 500mから1500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 0 | 1500mより大きい | 1衛星パスで4メッセージ以上の受信が必要。位置サービスプラスを適用した場合に計算する。 |
| G | 100m以内 | GPS受信機で計算した位置。特別な処理が必要なため詳しくはお問い合わせください。 |
| A | 特定できない | 1衛星パスで3メッセージ受信したときに計算する位置。位置サービスプラスの適用が必要。 |
| B | 特定できない | 1衛星パスで2メッセージ受信したときに計算する位置。カルマンフィルターでは1メッセージでも計算する。位置サービスプラスの適用が必要。 |
| Z | 位置算出ができなかった、または位置計算アルゴリズムが正しく収束しなかったことを示します。 |
代表メッセージの選び方
| ルール1 | 同じ内容のセンサーデータ値をもつメッセージの数が一番多いメッセージが代表データになる。 |
| ルール2 | 同じ内容のセンサーデータ値をもつメッセージの数が一番多いメッセージが2種類以上ある場合、一番後に受信したメッセージが代表データになる |
| ルール3 | 受信したメッセージが全部異なる場合、最後から2番目に受信したメッセージが代表データとなる。 |
例) A, B, C, Dの4種類のメッセージがあります。ある衛星パスにて、以下の表のように4個のメッセージを受信した場合の代表データを示します。
| 1番目 | 2番目 | 3番目 | 4番目 | 代表データ | |
| パターン1 | A | A | A | B | A |
| パターン2 | A | A | B | B | B |
| パターン3 | A | B | C | D | C |
DIAGフォーマット
DIAGフォーマットは、野生動物に装着した送信機など、衛星でメッセージの受信が少ない場合に使用します。品質チェックを満たさないため通常配信されない位置データも配信し、同時に位置計算に関する種々のパラメータを提供してユーザーが位置データの有用性を判断するのを助けます。
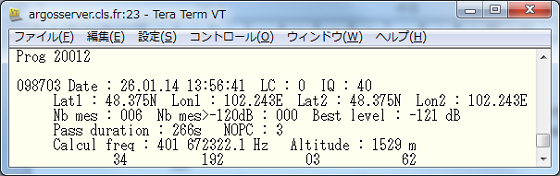
| 1行目 | |
| 098703 | アルゴスID番号 |
| Date : 26.01.14 | 位置データの年月日。日.月.年の順に表示します。 |
| 13:56:41 | 位置データの時刻(世界時)。時:分:秒の順に表示します。 |
| LC : 0 | 位置クラス(Location Class) 詳しくは |
| IQ : 40 | Quality Indexの略でデータの品質指数を2桁の数字で表しています。詳しくはオンラインマニュアル(英文)の第6.3.6.3章()をご覧ください。 |
| 2行目 | |
| Lat1 : 48.375N | 緯度。数値のあとにN(北緯)またはS(南緯)をつけて表示します。 |
| Lon1 : 102.243E | 経度。数値のあとにE(東経)またはW(西経)をつけて表示します。 |
| Lat2 : 48.375N | ミラー位置の緯度。最小二乗法およびカルマンフィルターの初期化では2つの位置データを算出します。このうち位置計算アルゴリズムが正しい位置だと判断した位置データをLat1およびLon1で表示します。もうひとつの位置がミラー位置と呼ばれるもので、Lat2はこの緯度を表します。カルマンフィルターによる位置算出では位置が一意に決まるため、Lat1と同じ値が表示されます。数値のあとにN(北緯)またはS(南緯)をつけて表示します。 |
| Lon2 : 102.243E | ミラー位置の経度。カルマンフィルターによる位置算出ではLon1と同じ値になります。 |
| 3行目 | |
| Nb mes : 006 | 受信メッセージ数 |
| Nb mes>-120dB : 000 | 衛星における受信レベルが-120dBよりも大きいメッセージ数 |
| Best level : -121 dB | 受信メッセージ数 |
| 4行目 | |
| Pass duration : 266s | 最初の受信から最後の受信までの時間 |
| NOPC : 3 | Number Of Plausibility Checkの略で、Lat1とLon1の位置が正しい位置であることを確かめるチェックを満たした数を表します。詳しくはオンラインマニュアル(英文)の第3.2章()をご覧ください。 |
| 5行目 | |
| Calcul freq : 401.672322.1 Hz | 衛星の受信装置で計算したプラットフォームの送信周波数 |
| Altitude : 1529m | 高度。緯度および経度はこの高度を前提に計算されています。通常はアルゴスIDを発行する際に固定値(例えば海洋漂流ブイは0m)を設定します。陸上の移動体および鳥類追跡用のプラットフォームでは、アメリカ地質調査所 USGS の数値標高モデル GTOPO30 を位置計算のアルゴリズムに組み込んでおり、その位置のGTOPO30の高度を基に緯度および経度を算出します。この高度値を表示します。 |
| 6行目 | |
| 34 | 1番目のセンサーデータ |
| 192 | 2番目のセンサーデータ |
| 03 | 3番目のセンサーデータ |
| 62 | 4番目のセンサーデータ |
位置クラス
位置精度および位置計算に関する情報を表します。位置精度は、衛星パスの幾何学的条件、送信機の送信周波数の安定度、受信メッセージ数およびそれらのパス時間内での分布、などに依存します。
| クラス | 誤差 | |
| 3 | 250m以内 | 1衛星パスで4メッセージ以上の受信が必要。 |
| 2 | 250mから500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 1 | 500mから1500m | 1衛星パスで4メッセージ以上の受信が必要。 |
| 0 | 1500mより大きい | 1衛星パスで4メッセージ以上の受信が必要。位置サービスプラスを適用した場合に計算する。 |
| G | 100m以内 | GPS受信機で計算した位置。特別な処理が必要なため詳しくはお問い合わせください。 |
| A | 特定できない | 1衛星パスで3メッセージ受信したときに計算する位置。位置サービスプラスの適用が必要。 |
| B | 特定できない | 1衛星パスで2メッセージ受信したときに計算する位置。カルマンフィルターでは1メッセージでも計算する。位置サービスプラスの適用が必要。 |
| Z | 位置算出ができなかった、または位置計算アルゴリズムが正しく収束しなかったことを示します。 |